Conference
In International Conference on Machine Learning (ICML), 2021 Spotlight
We propose a principled exploration method for DRL through Optimistic Bootstrapping and Backward Induction (OB2I).
In Neural Information Processing Systems (NeurIPS), 2021
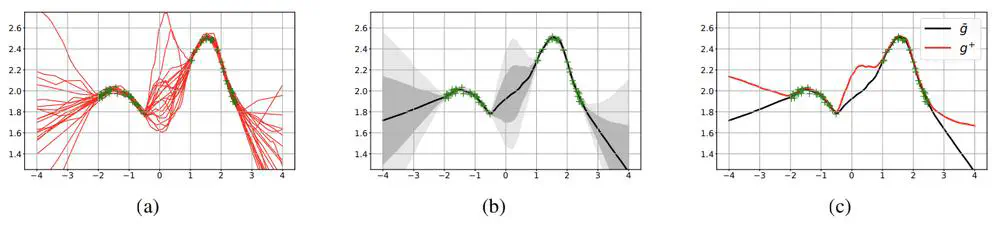
We propose a Dynamic Bottleneck (DB) model, which attains a dynamics-relevant representation based on the information-bottleneck principle.
International Conference on Learning Representations (ICLR), 2022 Spotlight
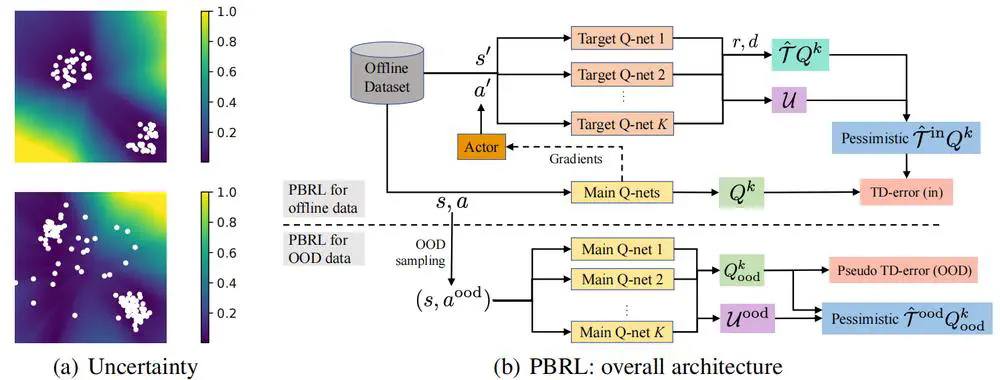
We propose Pessimistic Bootstrapping for offline RL (PBRL), a purely uncertainty-driven offline algorithm without explicit policy constraints.
In International Conference on Machine Learning (ICML), 2022 Spotlight
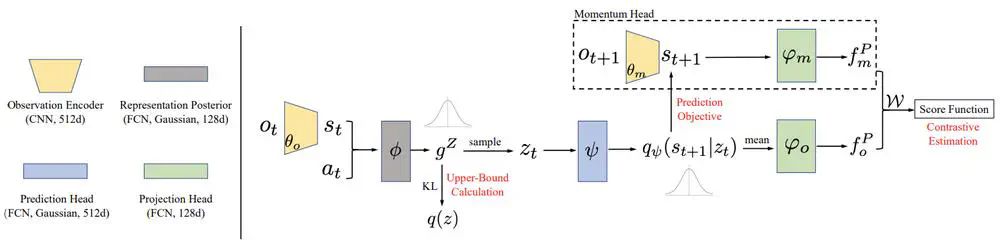
We study how RL can be empowered by contrastive learning in a class of Markov decision processes (MDPs) and Markov games (MGs) with low-rank transitions. For both models, we propose to extract the correct feature representations of the low-rank model by minimizing a contrastive loss.
In Neural Information Processing Systems (NeurIPS), 2022 Spotlight
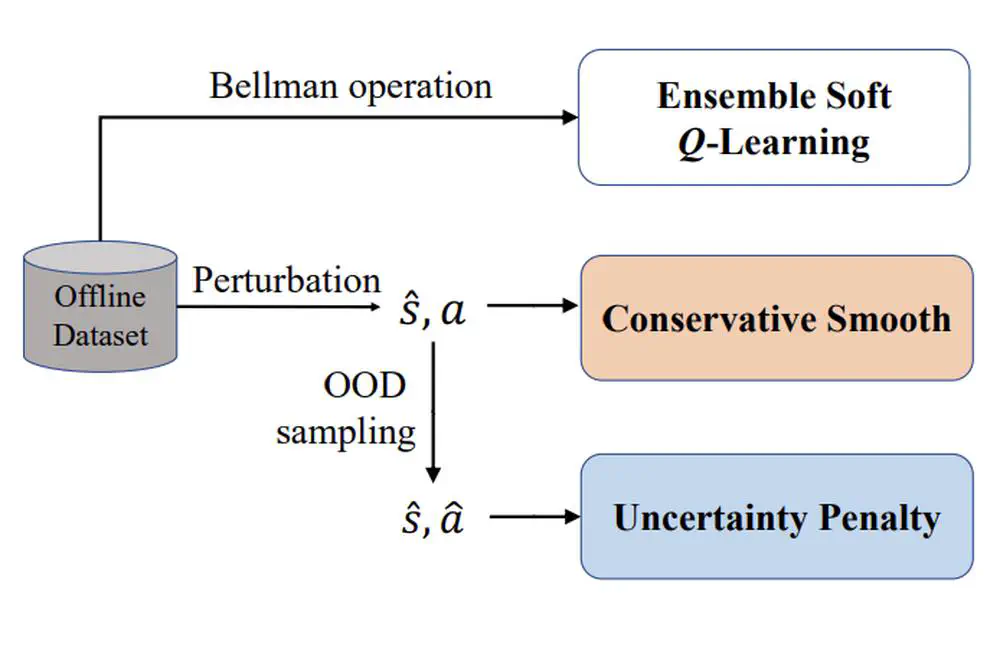
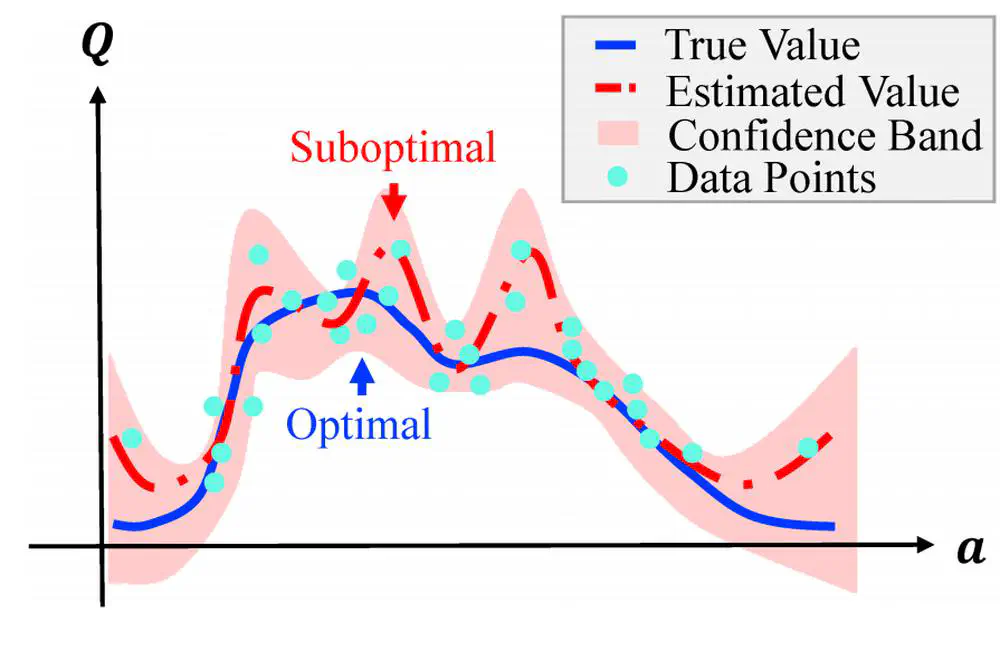
We propose Robust Offline Reinforcement Learning (RORL) with a novel conservative smoothing technique.
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2023
We propose falSe COrrelation REduction (SCORE) for offline RL, a practically effective and theoretically provable algorithm.
In International Conference on Machine Learning (ICML), 2023
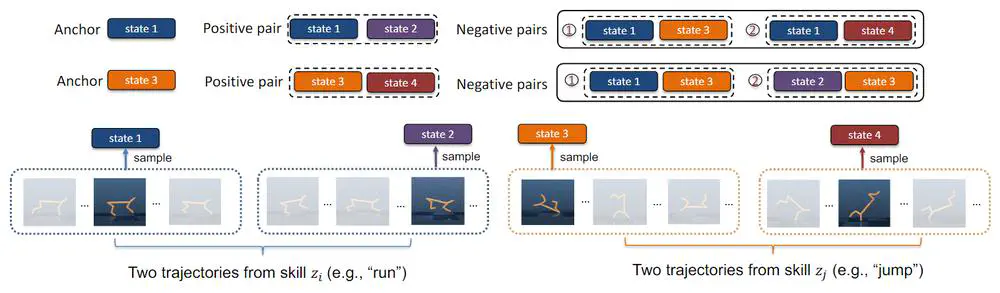
We propose a novel unsupervised skill discovery method through contrastive learning among behaviors, which makes the agent produce similar behaviors for the same skill and diverse behaviors for different skills.
In Neural Information Processing Systems (NeurIPS), 2023
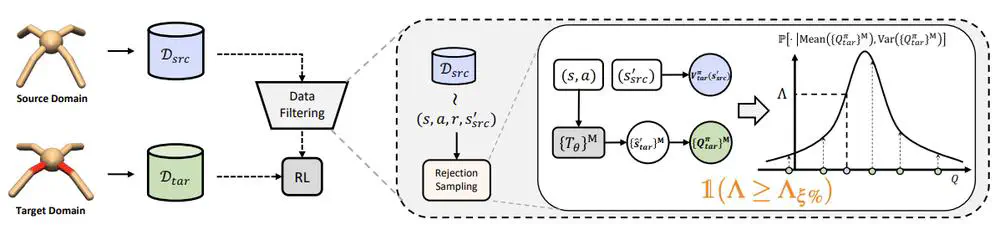
We reveal the limitations of these methods and explore the problem from the value difference perspective via a novel insight on the value consistency across domains.
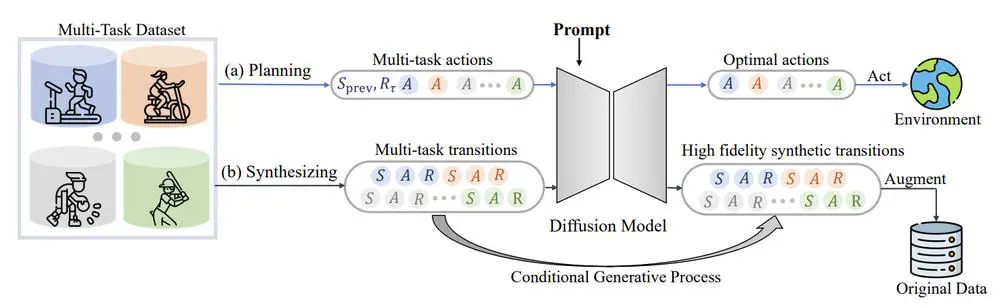
In Neural Information Processing Systems (NeurIPS), 2023
We aim to investigate the effectiveness of a single diffusion model in modeling large-scale multi-task offline data, which can be challenging due to diverse and multimodal data distribution.
In AAAI Conference on Artificial Intelligence (AAAI), 2024
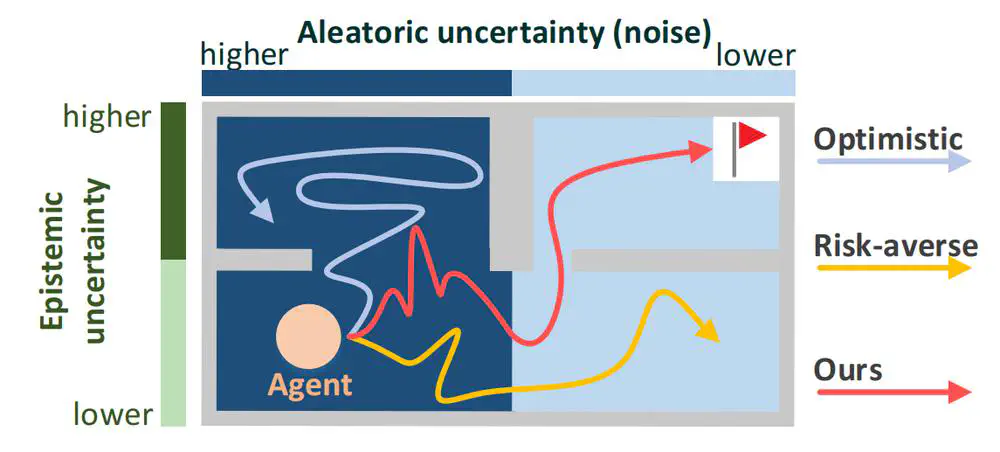
We propose Optimistic Value Distribution Explorer (OVD-Explorer) to achieve a noise-aware optimistic exploration for continuous control.