Chenjia Bai
Chenjia Bai
Home
Book
Publications
Team
Join us
Light
Dark
Automatic
Under-Review
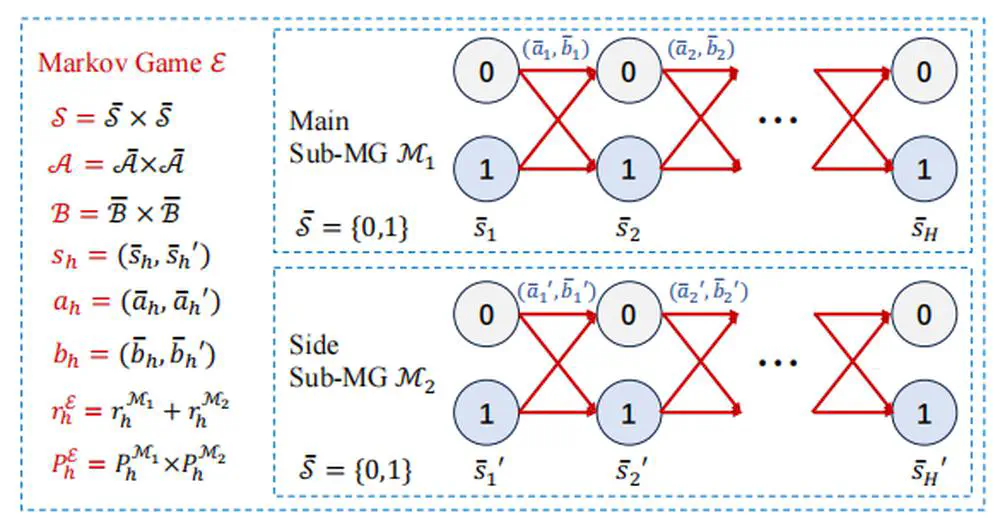
Provably Efficient Information-Directed Sampling Algorithms for Multi-Agent Reinforcement Learning.
In
Artificial Intelligence (under review)
This work designs and analyzes a novel set of algorithms for multi-agent reinforcement learning (MARL) based on the principle of information-directed sampling (IDS).
Qiaosheng Zhang
,
Chenjia Bai
,
Shuyu Hu
,
Zhen Wang
✉
,
Xuelong Li
✉
PDF
Cite
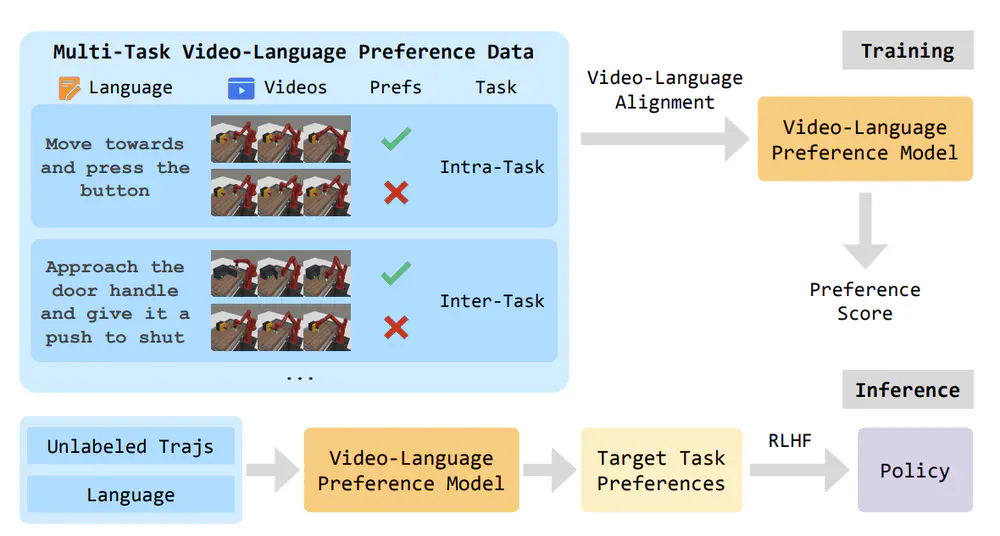
VLP: Vision-Language Preference Learning for Embodied Manipulation.
under review
we propose a novel Vision-Language Preference learning framework that learns a vision-language preference model to provide preference feedback for embodied manipulation tasks.
Runze Liu
,
Chenjia Bai
✉
,
Jiafei Lyu
,
Shengjie Sun
,
Yali Du
,
Xiu Li
✉
PDF
Cite
Project
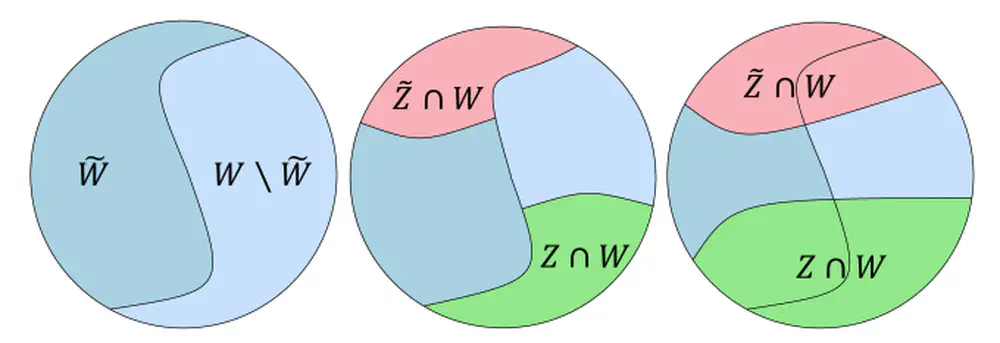
Information-Theoretic Reward Decomposition for Generalizable RLHF.
under review
We decompose the reward value in RLHF into two independent components that consists prompt-free reward and prompt-related reward, and propose a new reward learning algorithm by prioritizing data samples based on their prompt-free reward values.
Liyuan Mao
,
Haoran Xu
,
Amy Zhang
,
Weinan Zhang
✉
,
Chenjia Bai
✉
PDF
Cite
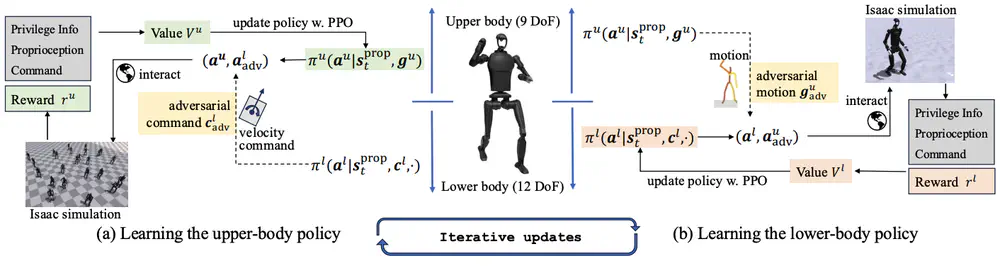
Adversarial Locomotion and Motion Imitation for Humanoid Policy Learning
under review
We propose Adversarial Locomotion and Motion Imitation (ALMI) for humanoid robots, which serves as a novel framework for loco-manipulation tasks, enabling adversarial policy learning between upper and lower body.
Jiyuan Shi
,
Xinzhe Liu
,
Dewei Wang
,
Ouyang Lu
,
Sören Schwertfeger
,
Fuchun Sun
,
Chenjia Bai
✉
,
Xuelong Li
✉
PDF
Cite
Project
公众号
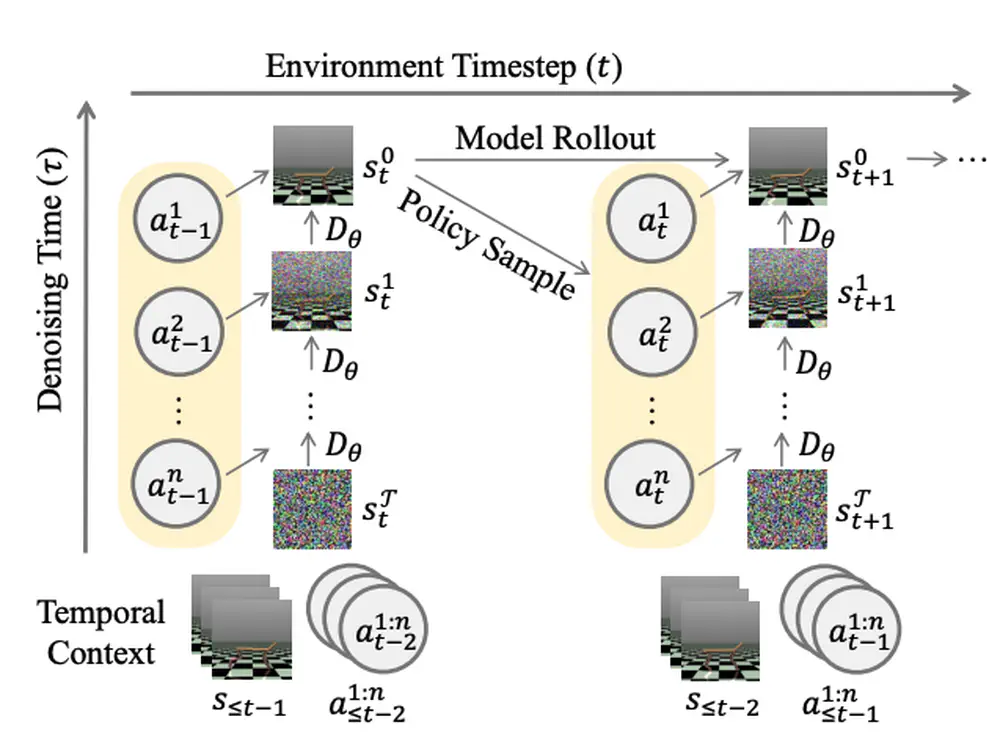
Revisiting Multi-Agent World Modeling from a Diffusion-Inspired Perspective
under review
We propose Diffusion-Inspired Multi-Agent world model (DIMA), a novel framework for multi-agent reinforcement learning that leverages diffusion models to reduce modeling complexity and improve sample efficiency.
Yang Zhang
,
Xinran Li
,
Jianing Ye
,
Delin Qu
,
Shuang Qiu
,
Chongjie Zhang
,
Xiu Li
,
Chenjia Bai
✉
PDF
Cite
Learn as Individuals, Evolve as a Team: Multi-agent LLMs Adaptation in Embodied Environments
under review
We propose the Learn as Individuals, Evolve as a Team (LIET) framework to enable multi-agent LLMs to adapt to embodied environments through individual learning and team evolution
Xinran Li
,
Chenjia Bai
✉
,
Zijian Li
,
Jiakun Zheng
,
Ting Xiao
,
Jun Zhang
✉
PDF
Cite
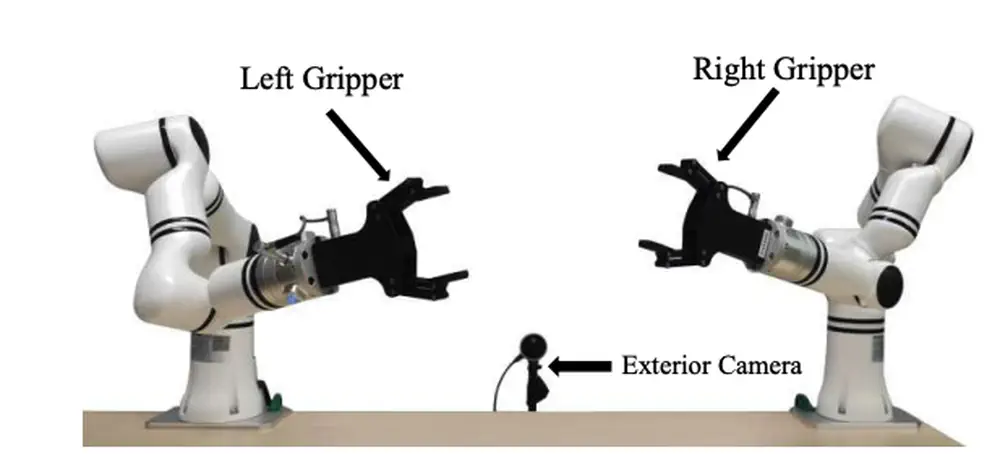
Towards a Generalizable Bimanual Foundation Policy via Flow-based Video Prediction
under review
We propose a novel bimanual foundation policy that leverages text-to-video models to predict robot trajectories and uses optical flow as an intermediate variable to improve generalization.
Chenyou Fan
,
Fangzheng Yan
,
Chenjia Bai
✉
,
Jiepeng Wang
,
Chi Zhang
,
Zhen Wang
,
Xuelong Li
✉
PDF
Cite
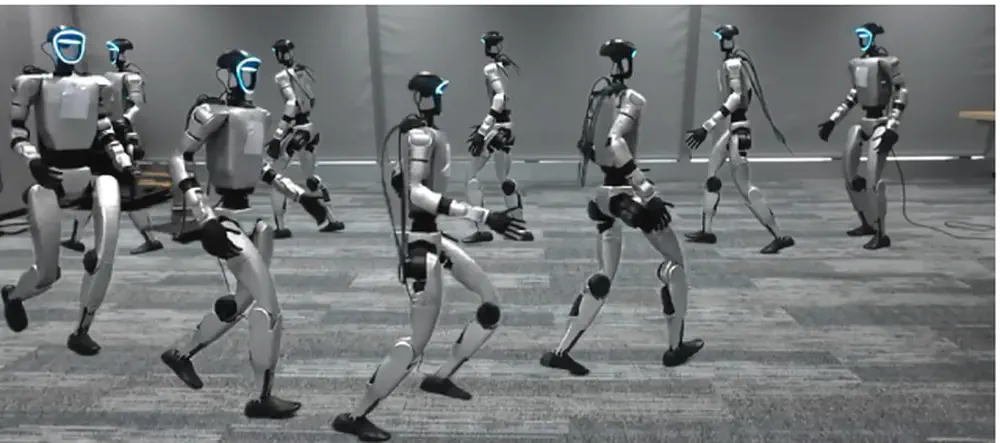
MoRE: Mixture of Residual Experts for Humanoid Lifelike Gaits Learning on Complex Terrains
under review
We propose a novel framework that enables humanoid robots to traverse complex terrains with controllable human-like gaits using a mixture of latent residual experts and multi-discriminators.
Dewei Wang
,
Xinmiao Wang
,
Xinzhe Liu
,
Jiyuan Shi
,
Yingnan Zhao
,
Chenjia Bai
✉
,
Xuelong Li
✉
PDF
Cite
Project
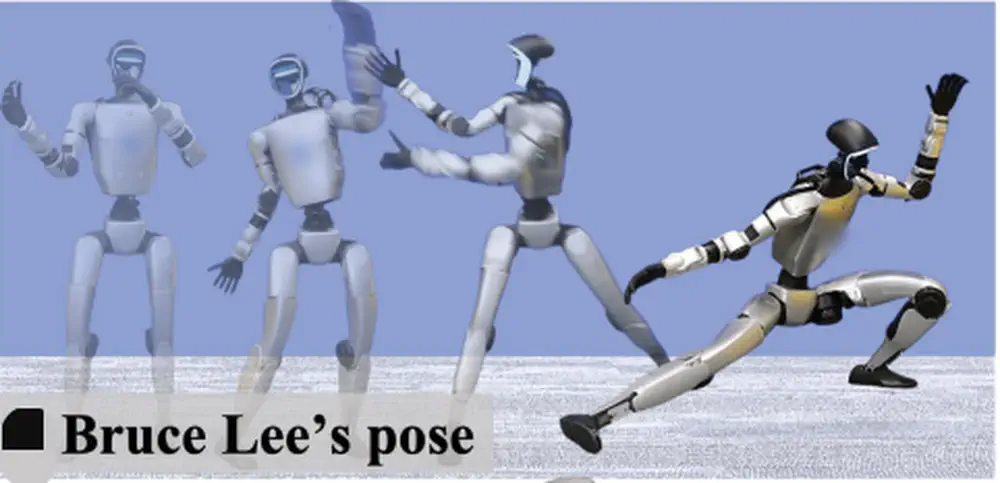
KungfuBot: Physics-Based Humanoid Whole-Body Control for Learning Highly-Dynamic Skills
under review
We propose a physics-based humanoid control framework, aiming to master highly-dynamic human behaviors such as Kungfu and dancing through multi-steps motion processing and adaptive motion tracking.
Weiji Xie(+)
,
Jinrui Han(+)
,
Jiakun Zheng(+)
,
Huanyu Li
,
Xinzhe Liu
,
Jiyuan Shi
,
Weinan Zhang
,
Chenjia Bai
✉
,
Xuelong Li
✉
PDF
Cite
Code
Project
公众号
Cite
×